
Стоит признать: электромеханические механизмы с сенсорной обратной связью создавались и до творений Уолтера. Так, в 1928 году, демонстрируя тогдашние достижения радиоэлектроники, концерн Philips Radio выпустил Philips Radio Dog, или, сокращённо, Philidog. Особенностью этой электромеханической игрушки было использование фотокатода в качестве сенсора освещённости. Благодаря ему радиопёс Philips следовал за источником света, например фонариком в руке владельца.
Вряд ли поведение Philidog можно назвать осознанным. Скорее, это был автомат, упакованный в игрушечный корпус.
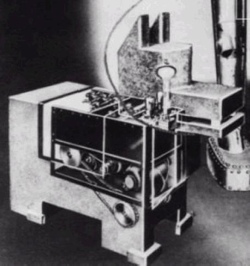
Грей Уолтер же планировал смоделировать осознанное поведение, основываясь на своих обширных познаниях в нейрофизиологии. И у него это получилось! Первым его творением стал ELMER (сокращение от ElectroMechanical Robot). Собранный в буквальном смысле из того, что было под рукой, Elmer представлял собой трёхколесную тележку с электроприводом переднего колеса, управление движением и поворотом которого выполняли два «нейрона» — схемы на основе лампового усилителя и реле.
Базовая схема всех роботов-черепах Грея Уолтера была проста. Датчик света, датчик прикосновений и два ламповых «нейрона»
Один из нейронов был подключен к «глазу» ELMER — фотоэлектрическому элементу. Второй обеспечивал обработку реакции на прикосновение к корпусу. В первом варианте ELMER роль датчика прикосновения выполнял обыкновенный телеграфный ключ. Целевой функцией первой робочерепахи было движение к источнику света, который она искала, целенаправленно поворачивая свой корпус. Датчик прикосновения использовался для обнаружения препятствия и заставлял ELMER давать задний ход. Дифференцирование сигналов от двух датчиков приводило к тому, что ELMER с большим успехом объезжал препятствия и добирался до своей лампочки-кормушки.