
В последние годы методы щадящей хирургии обрели популярность у врачей и, разумеется, у пациентов. Вместо большого разреза теперь применяют специальные катетеры - тонкую трубку вводят через крупные сосуды и производят необходимые манипуляции без серьезного хирургического вмешательства.
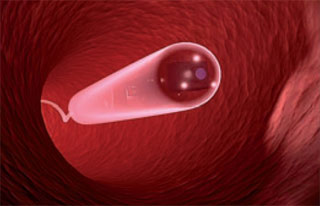
Однако далеко не всегда с помощью катетера можно достать до нужного места - например, чтобы удалить сузившие сосуд атеросклеротические бляшки: путь может быть слишком длинен и извилист или сосуды окажутся слишком тонкими. В этом случае идеально подошли бы миниатюрные роботы, управляемые хирургом. Но они должны уметь перемещаться достаточно быстро, чтобы противодействовать току крови, а для этого нужен мощный и эффективный мотор.
Похоже, австралийцам удалось вплотную подойти к решению этой задачи. Для перемещения роботов они предложили конструкцию ультразвукового пьезомотора, диаметром 250 мкм, способного вращать похожий на жгутик бактерии винт со скоростью 1300 оборотов в минуту, развивая мощность четыре микроватта. Это примерно в пять раз меньше, чем необходимо для движения против тока крови, но экспериментаторы уверены, что их конструкция обладает большим потенциалом.
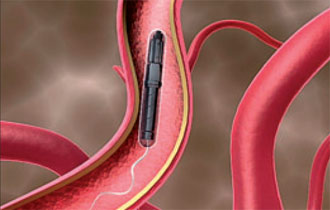
Собственно пьезомоторы были разработаны еще в восьмидесятые годы прошлого столетия и сегодня широко применяются, например, для перемещения линз фотообъективов. Но такой маленький моторчик еще никто не использовал. Австралийский агрегат состоит из цилиндрического статора со спиральной канавкой и прижатого к его торцу пьезокристалла; с другого торца статор упирается в ротор. На пьезокристалл подается переменное